Turtlebot3-burger键盘控制
环境准备:
- 安装好环境的burger小车
- 安装好的ros的ubuntu(16.04)主机一台,安装教程可以参考这个
- 小车(从端)和ubuntu主机(主端)在同一局域网下
参考资料:点击这里
1. 小汉堡与ubuntu主机的连接
工作环境说明:
小汉堡ip:192.168.1.105
ubuntu主机ip:192.168.1.101
1.1 配置环境变量
ubuntu主机配置:
修改.bashrc文件(相当于shell的配置文件)
1 | sudo vi ~/.bashrc |
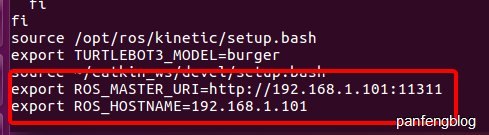
在最后加上如下两行,ROS_MASTER_URI是主机ip,ROS_HOSTNAME是本机的ip
1 | export ROS_MASTER_URI=http://[ubuntu主机ip]:11311 |
让配置文件生效,记得重新打开shell!!(由于刚刚修改配置文件,之前打开的shell可能不会生效)
1 | source ~/.bashrc |
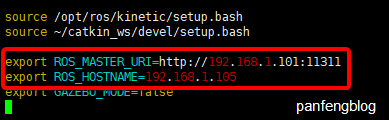
小汉堡从机配置
这里的配置和主机是类似的,首先也是修改.bashrc文件
1 | sudo vi ~/.bashrc |
主节点ip还是设置为ubuntu的ip(是主节点),本机ip设置为小汉堡的ip
1 | export ROS_MASTER_URI=http://[ubuntu主机ip]:11311 |
然后让配置文件生效
1 | source ~/.bashrc |
1.2 连接主端和从端
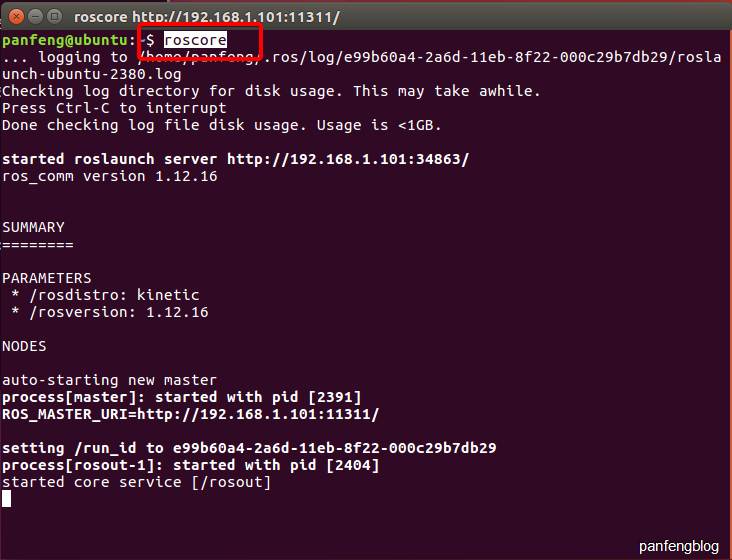
打开一个ubuntu主机shell,执行roscore,启动ros的核心节点(包括Master, Paremeter Server, rosout等等),注意:之后一直不要关闭这个节点!!
1 | roscore |
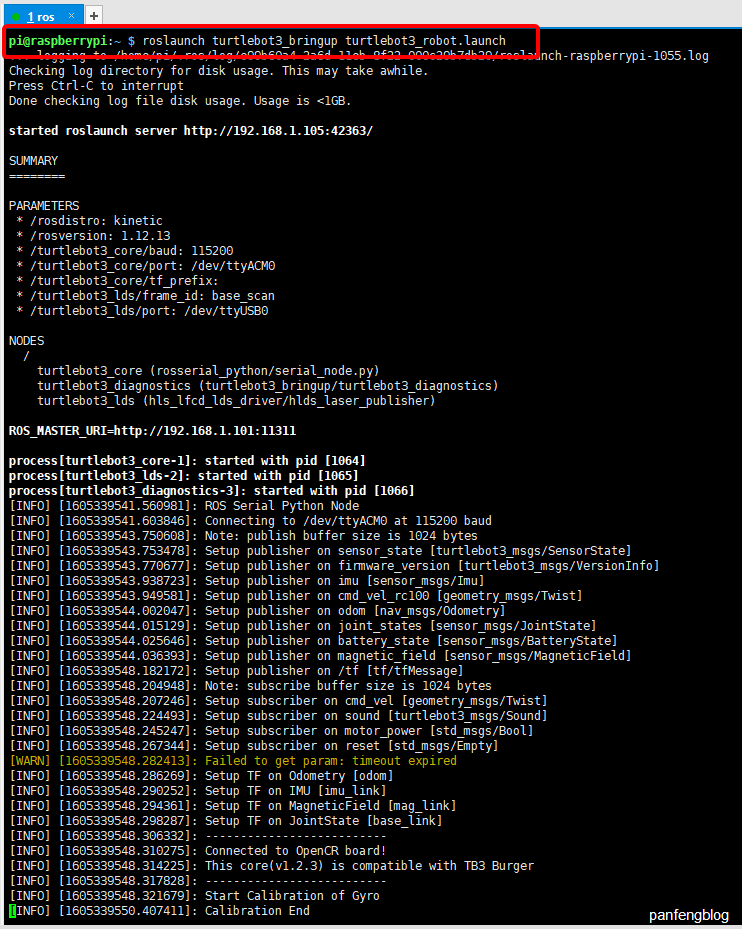
在小汉堡shell中,执行如下命令(roslaunch从一个XML配置文件启动一组节点)
1 | roslaunch turtlebot3_bringup turtlebot3_robot.launch |
然后小汉堡就会尝试连接master节点,连接成功如下图:
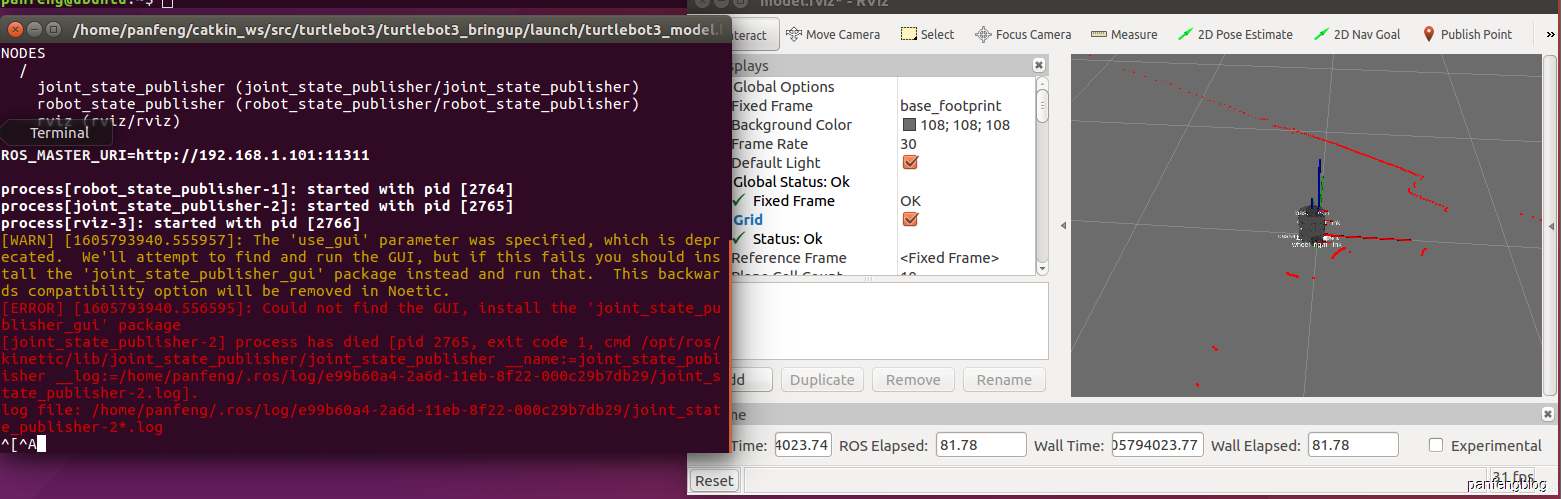
然后可以验证一下我们的连接,执行如下命令,打开rviz
rviz是ros自带的一个图形化攻击,可以方便的对ros程序进行图形化操作
1 | export TURTLEBOT3_MODEL=burger |
连接成功的状态应该可以看到小车的激光雷达扫描到的周围的物体(如下图)
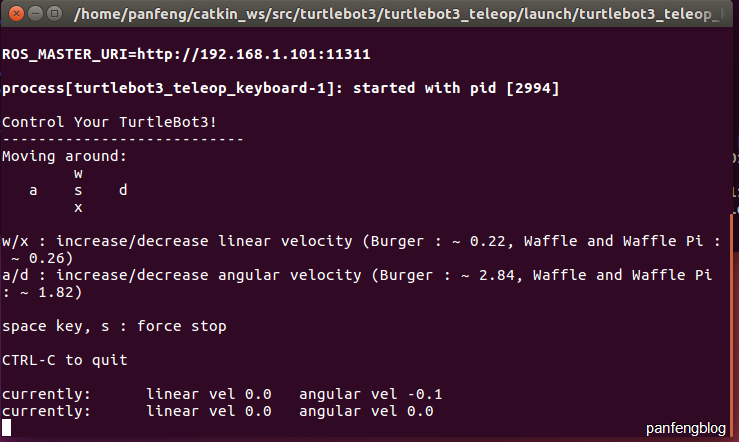
1.3 键盘控制
再在ubuntu主机上打开一个shell(注意:执行roscore节点的那个shell一直不要关!!)
1 | roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch |
然后就可以使用wasdx控制我们的小车了~~