Ubuntu18.04&16.04的ROS安装
ROS (Robot Operating System, 机器人操作系统) 提供一系列程序库和工具以帮助软件开发者创建机器人应用软件。它提供了硬件抽象、设备驱动、函数库、可视化工具、消息传递和软件包管理等诸多功能。ROS遵循BSD开源许可协议。
不同的Ubuntu 版本安装过程会有点小区别哟 : )
安装过程&出错记录
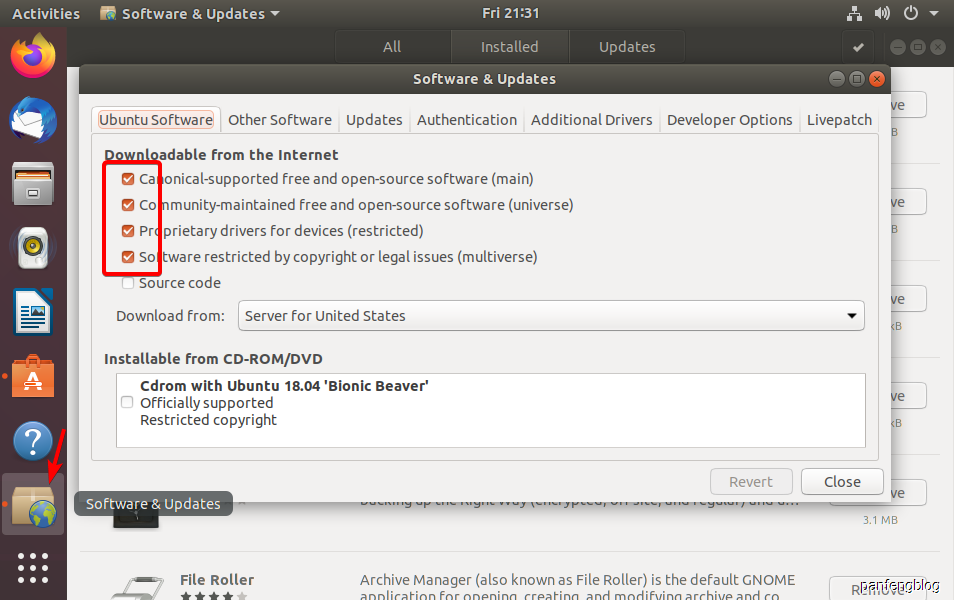
- 确认软件库设置
确保软件库这四个选项都勾选上了~
- 添加ROS软件源
1 | sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list' |
- 添加密钥
1 | sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 |
- 安装ROS(注意这里不同的ubuntu版本安装命令可能不一样)
出错记录:执行sudo apt update 更新软件源时可能会失败,一般都是网络问题,多尝试几次或者切换网络后再尝试一下即可。
对于ubuntu18.04:
1 | sudo apt update |
对于ubuntu16.04:
1 | sudo apt update |
- 初始化 rosdep
出错记录:执行sudo rosdep init初始化时提示找不到rosdep命令(sudo: rosdep: command not found),我们只需要安装一下rospack-tools即可:sudo apt install rospack-tools
1 | sudo rosdep init |
- 设置环境变量
对于ubuntu18.04:
1 | echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc |
检查环境变量是否安装成功,输入ros,按两下tab键,出现命令提示信息即可~
对于ubuntu16.04:
1 | echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc |
- 安装rosInstall
1 | sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential |
安装完成,ros安装默认路径为~/opt/ros
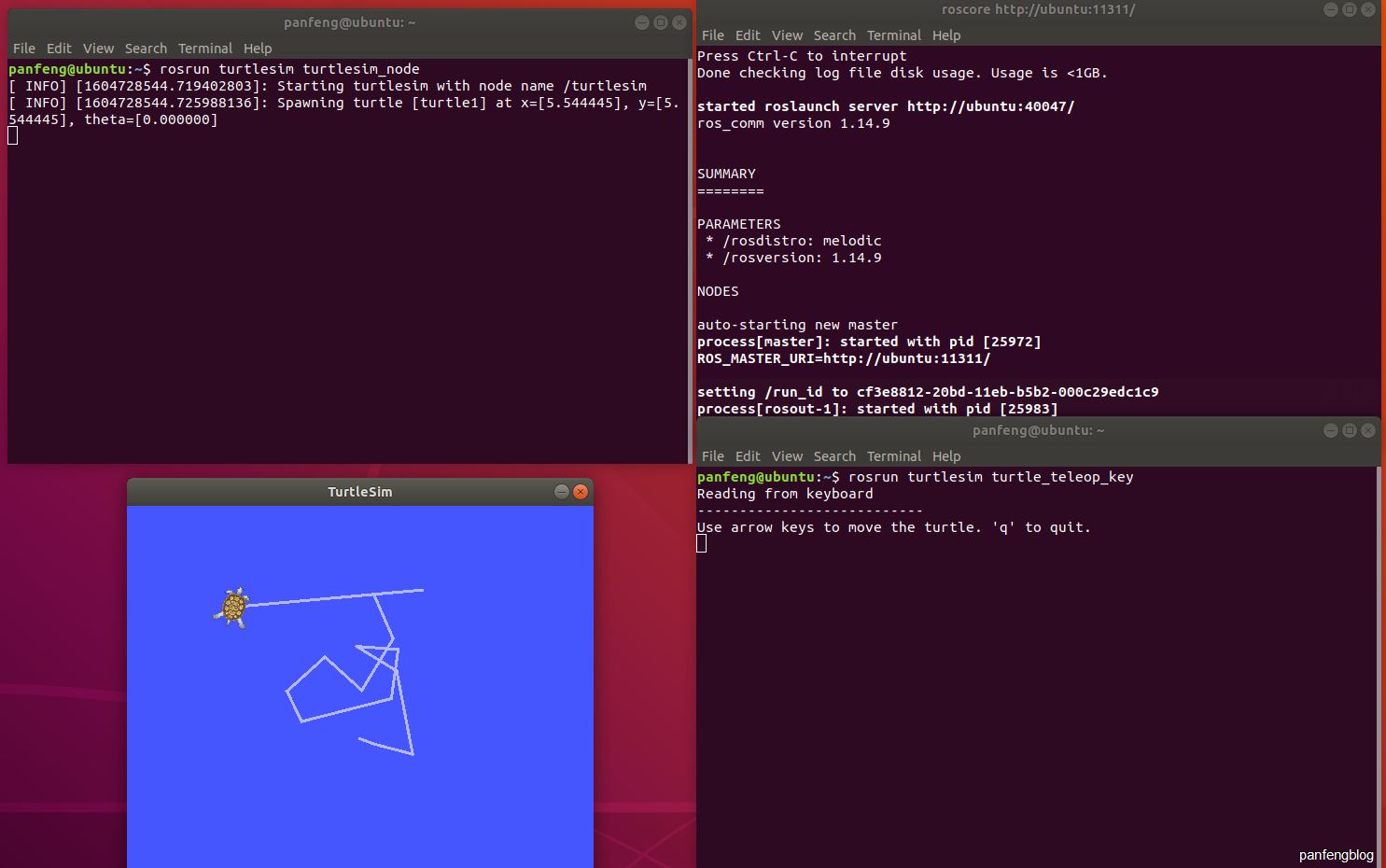
HelloWorld: turtle(小海龟)
安装完成后可以运行一下小海龟程序
- 启动ros master(启动完成后不要关闭终端)
1 | roscore |
- 再新的终端窗口下启动小海龟仿真节点(启动完成后不要关闭终端)
1 | rosrun turtlesim turtlesim_node |
- 再新的终端窗口下启动小海龟控制节点
1 | rosrun turtlesim turtle_teleop_key |
于是我们就能够使用 ↑, ↓, ←, → 按键控制小海龟了 : )